La carrera se caracteriza por integrar periodos de apoyo y de oscilación, entre los que se incluye los intervalos o tiempos de vuelo. Durante la carrera no existen tiempos de doble apoyo, por tanto, es un patrón que, a diferencia de la marcha, solo una pierna o ninguna están en contacto con el suelo.
En contraste con la marcha humana, en la carrera aumenta la cadencia, la longitud de paso y de zancada, disminuye la base de apoyo, el periodo de apoyo ocupa un porcentaje del ciclo inferior al 50% y existe superposición de los periodos de oscilación de las extremidades inferiores, razón por la cual se generan los intervalos de vuelo (Nicola et al. 2012).
Además, en la carrera existe un mayor impacto sobre el suelo, de hecho, el 80% del gasto energético se invierte en la recepción del peso corporal y en la propulsión (Van Oeverten et al. 2021). Por último, prosiguiendo con la comparación con la marcha, en la carrera las amplitudes articulares aumentan, la actividad muscular predominante es de tipo excéntrico y existe variación en las modalidades de contacto inicial. Este aspecto es característico del patrón, ya que, a diferencia con la marcha, el contacto inicial no siempre se realiza con el talón, puede realizarse con toda la planta del pie y con el antepié, según la velocidad de carrera y la longitud de la zancada.
Fases de la Carrera
La carrera se organiza en periodos, intervalos y fases. A continuación, se enumeran cada uno de ellos (Dugan 2005):
- Periodos: Apoyo y Oscilación.
- Intervalos: Apoyo unipodal y Vuelo.
- Fases: Contacto inicial, Absorción (respuesta a la carga), Apoyo medio, Propulsión, Despegue, Oscilación inicial, Oscilación media y Oscilación final.
En cada fase, suceden un conjunto de eventos cinemáticos específicos que dependen de una actividad muscular concreta.
Contacto inicial
Las opciones de choque con el suelo en la carrera dependen de la velocidad, de la longitud de la zancada y de la posición de la rodilla en el contacto inicial. Con el pie más alejado del cuerpo y a más velocidad, el contacto puede realizarse con el talón o con la zona media del pie, siempre y cuando la rodilla esté próxima a la extensión en el choque. En corredores de velocidad y con un buen gesto, no alejan tanto el pie de su cuerpo porque disminuyen la extensión de la rodilla durante el contacto inicial, lo que favorece que el impacto sea con la parte anterior del pie, a pesar de realizar una longitud de zancada amplia.
Cuando el pie está más próximo al cuerpo y se corre a menos velocidad, el contacto se lleva a cabo con la zona media del pie o con el antepié. En cualquier caso, el ángulo tibia pie no cambia, se mantiene a 90 grados y se estabiliza a través de la actividad muscular del tibial anterior y del tríceps sural, que aseguran un choque estable.

Fuente: Van Oeverten et al 2021
Absorción
Durante la fase de absorción se produce la extensión de cadera desde una posición de flexión de 25 grados, a través de la actividad de los músculos bíceps femoral y glúteo mayor, que estabilizan y favorecen la progresión. A nivel de la articulación de la rodilla se produce una flexión de 25 grados que se incrementa hasta los 45 grados, la cual tiene el propósito de amortiguar el impacto. Para controlar la articulación existe una actividad excéntrica del cuádriceps femoral y la co-activación del músculo bíceps femoral. A nivel proximal, los músculos aductores (mayor, mediano y menor) y el músculo glúteo medio estabilizan el fémur y la pelvis en el plano frontal. A nivel distal, la tibia realiza un movimiento de flexión dorsal (20 grados) que controla de forma excéntrica el sóleo y que cuenta con el apoyo estabilizador del músculo tibial anterior. Además, se produce una pronación a nivel de articulación subastragalina, que es controlada por el músculo tibial posterior. El objetivo último de esta fase es disipar el impacto.
Apoyo medio
En la fase de apoyo medio, existe una transición entre las funciones de absorción y de progresión. La tibia continúa su desplazamiento hacia delante bajo el control de tríceps sural, así como la pronación controlada por el músculo tibial posterior. La articulación de la rodilla se encuentra estabilizada por los músculos recto femoral y bíceps femoral; mientras que, la cadera prosigue su recorrido hacia la extensión (10-20 grados).
Propulsión
En esta fase se produce el pico máximo de dorsiflexión (20 grados) y de pronación (6-8 grados). La oscilación de la extremidad inferior contralateral genera un torque (momento o tendencia) en la extremidad inferior apoyada hacia rotación externa de cadera y supinación del pie. La supinación del pie se acompaña de un incremento de la altura del arco plantar, que requiere de la actividad del músculo tríceps sural y de los músculos intrínsecos del pie, que facilitan el mecanismo del torno o de ”windlass”.
Despegue
Durante la fase de despegue se produce la propulsión de la extremidad inferior que inicia el periodo de oscilación. Para ello, tiene lugar una flexión plantar (20 grados) con supinación (6-8 grados) controlada por los músculos tríceps sural, tibial posterior y musculatura intrínseca del pie. La musculatura de la cadera participa también la propulsión, pero de forma habitual en velocidades de carrera elevadas.
El despegue requiere una importante inercia que evite el sobreuso de la musculatura y por tanto, su fatiga, para ello, existen un conjunto de patrones que generan velocidad, progresión y estabilidad. Estos movimientos son: el braceo de las extremidades superiores, una flexión de tronco controlada alrededor de los 10 grados y una anteversión pélvica entre 10 y 15 grados que asegura una longitud de zancada larga.
Oscilación
La oscilación inicial contiene el primer intervalo de vuelo, en el que se produce flexión de cadera de 65 grados (responsables: recto femoral y psoas), flexión de rodilla que alcanza los 90-130 grados (frenada por una acción excéntrica del músculo recto femoral) y control del pie (tibial anterior). El intervalo de vuelo termina con el contacto de la extremidad inferior contralateral, encontrándose la extremidad que oscila en la fase de oscilación media.

La oscilación terminal contiene el segundo intervalo de vuelo, que se inicia cuando la extremidad inferior contralateral se despega del suelo. La extremidad inferior oscilante se prepara para el choque del pie con los siguientes movimientos:
- Torque hacia extensión de cadera (activación de bíceps femoral y glúteo mayor).
- Torque hacia extensión de rodilla (inercia, recto femoral y control de bíceps femoral).
- Aductores (línea de progresión, acercan el fémur a la línea media).
- Coactividad de tibial anterior y tríceps sural para estabilizar el pie.
Traslación de la biomecánica a la patología
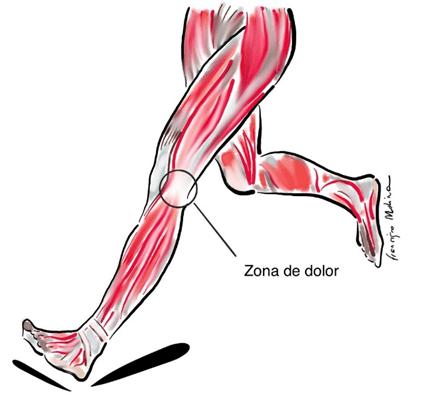
La biomecánica de la carrera influye en la fisiopatología de algunas de las lesiones más comunes que padecen los corredores. Por ejemplo, es el caso del síndrome de la cintilla ileotibial o rodilla del corredor. En el origen de esta afectación existen diversas teorías sobre el daño que sufre la cintilla, que recordemos se inserta en la zona lateral de tibia. Por un lado, existe el postulado de que la lesión se produce por una fricción entre la fascia y el cóndilo femoral externo. Por otro lado, otros autores hablan de un síndrome de hiperpresión del tejido adiposo que existe entre la fascia y el tejido óseo, que se produce por la compresión de la cintilla. En cualquier caso, existen diversos patrones durante la carrera que propician la fricción o la hiperpresión descritas:
- Exceso de inclinación de la pelvis y del tronco durante la carrera puede incrementar el riesgo de padecer síndrome de la cintilla ileotibal.
- Zancadas más largas durante la carrera que obligan a “talonear”.
- Debilidad de los músculos glúteo medio y tibial posterior que desestabilizan la pelvis y la tibia durante la carrera.
Expuesta la relación entre el síndrome de la cintilla ileotibial con el patrón de la carrera, Shen et al. (2021) propusieron que, reducir la flexión de cadera en el periodo de oscilación y la aducción de cadera en el apoyo durante la carrera pueden ser buenas estrategias para prevenir el síndrome de la cintilla ileotibial (posiciones que reducen la tensión de la banda). Además, tratar de acercar el pie al centro de gravedad del cuerpo durante la carrera para acortar longitud de zancada y aumentar cadencia, son opciones para descargar la cintilla.
En definitiva, la comprensión del patrón biomecánico de un gesto motor nos puede ayudar a entender porqué aparecen determinadas lesiones en nuestros pacientes. De esta manera, la reeducación y la búsqueda de un patrón más adecuado, ergonómico y beneficioso para nuestras estructuras corporales constituye una estrategia terapéutica a considerar en nuestras intervenciones.
Referencias
- Nicola T, Jewison D. The anatomy and biomechanics of running. Clin Sports Med 31 (2012): 187-201
- Dugan SA, Bhat KP. Biomechanics and analysis of running gait. Phys Med Rehabil Clin N Am 2005;16:603-21
- van Oeveren BT, de Ruiter CJ, Beek PJ, van Dieën JH. The biomechanics of running and running styles: a synthesis. Sports Biomech. 2021 Mar 4:1-39.
- Shen P, Mao D, Zhang C, Sun W, Song Q. Effects of running biomechanics on the occurrence of iliotibial band syndrome in male runners during an eight-week running programme-a prospective study. Sports Biomech. 2021 Aug;20(5):560-570.

[…] Biomecánica running. Fuente: INVESTIGAFISIO https://investigafisio.com/2023/03/09/biomecanica-de-la-carrera-traslacion-a-la-patologia/ […]
Me gustaMe gusta